Synthesis of Subject-Specific Human Balance Responses Using a Task-Level Neuromuscular Control Platform
Abstract
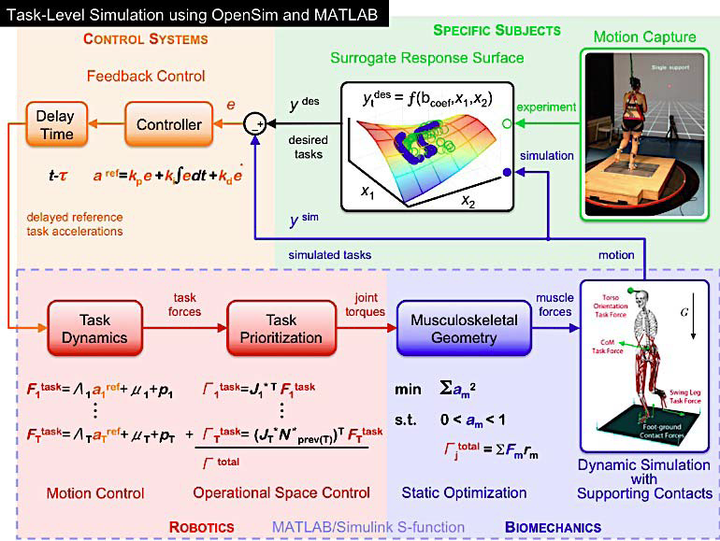
Many activities of daily living require a high level of neuromuscular coordination and balance control to avoid falls. Complex musculoskeletal models paired with detailed neuromuscular simulations complement experimental studies and uncover principles of coordinated and uncoordinated movements. Here, we created a closed loop forward dynamic simulation framework that utilizes a detailed musculoskeletal model (19 degrees of freedom, and 92 muscles) to synthesize human balance responses after support-surface perturbation. In addition, surrogate response models of task-level experimental kinematics from two healthy subjects were provided as inputs to our closedloop simulations to inform the design of the task-level controller. The predicted muscle activations and the resulting synthesized subject joint angles showed good conformity with the average of experimental trials. The simulated wholebody center of mass displacements, generated from a single kinematics trial per perturbation direction, were on average, within 7 mm (anterior perturbations) and 13 mm (posterior perturbations) of experimental displacements. Our results confirmed how a complex subject-specific movement can be reconstructed by sequencing and prioritizing multiple task-level commands to achieve desired movements. By combining the multidisciplinary approaches of robotics and biomechanics, the platform demonstrated here offers great potential for studying human movement control and subject-specific outcome prediction.